Yiyuan (Eric) ZHANG, PhD Candidate at National University of Singapore
Passionate about Bio-inspired and Soft Robotics
Keyword: Bioinspiration, Physical and Embodied Intelligence


Photo with PhD supervisor Prof. Cecilia Laschi (NUS ARC Director) and advisor Prof. Oussama khatib (Stanford University)
Education
| Degree | Institute | Period |
|---|---|---|
| Ph.D. | National University of Singapore, Mechanical Engineering | Aug 2022 – Present |
| B.Eng. | Beihang University (China), Mechanical Engineering | Sept 2017 – Jun 2022 |
| Exchange | RWTH Aachen University (Germany), Mechanical Engineering | Oct 2019 – Mar 2020 |
Introduction
Yiyuan ZHANG is a Ph.D. candidate supervised by Prof. Cecilia Laschi at the Soft Robotics Lab at the National University of Singapore. He received his B.Eng. degree with Beijing Outstanding Graduate Honors in Mechanical Engineering from Beihang University in 2022. He was the Research Assistant at the Biomechanics and Soft Robotics Lab at Beihang University under the supervision of Prof. Li Wen. Yiyuan's research topics include bio-inspired robotics/soft robotics design with embodied intelligence, especially octopus-inspired soft robots and remora-fish-inspired robots. His co-first authored Science Robotics paper has been featured by Science Magazine, NewScientist, China Daily, The New York Daily Paper, and other media presses.He has actively contributed to the academic community, serving as the Editorial Review Board of the International Journal of Advanced Robotic Systems (IJARS) and as the reviewer for top-tier SCI journals, including The International Journal of Robotics Research (IJRR), IEEE Transactions on Robotics (TRO), IEEE/ASME Transactions on Mechatronics (TMech), Advanced Intelligent Systems (AIS), and IEEE Robotics and Automation Letters (RAL). He also invited Prof. Shuzhi Sam Ge to deliver a keynote speech to the Chinese robotics community in Singapore.
Scroll Down to More ↓
Selected Publications
🐙 Learning from Nature
ESI Top 1% Highly Cited Paper

Co-first author, Science Robotics
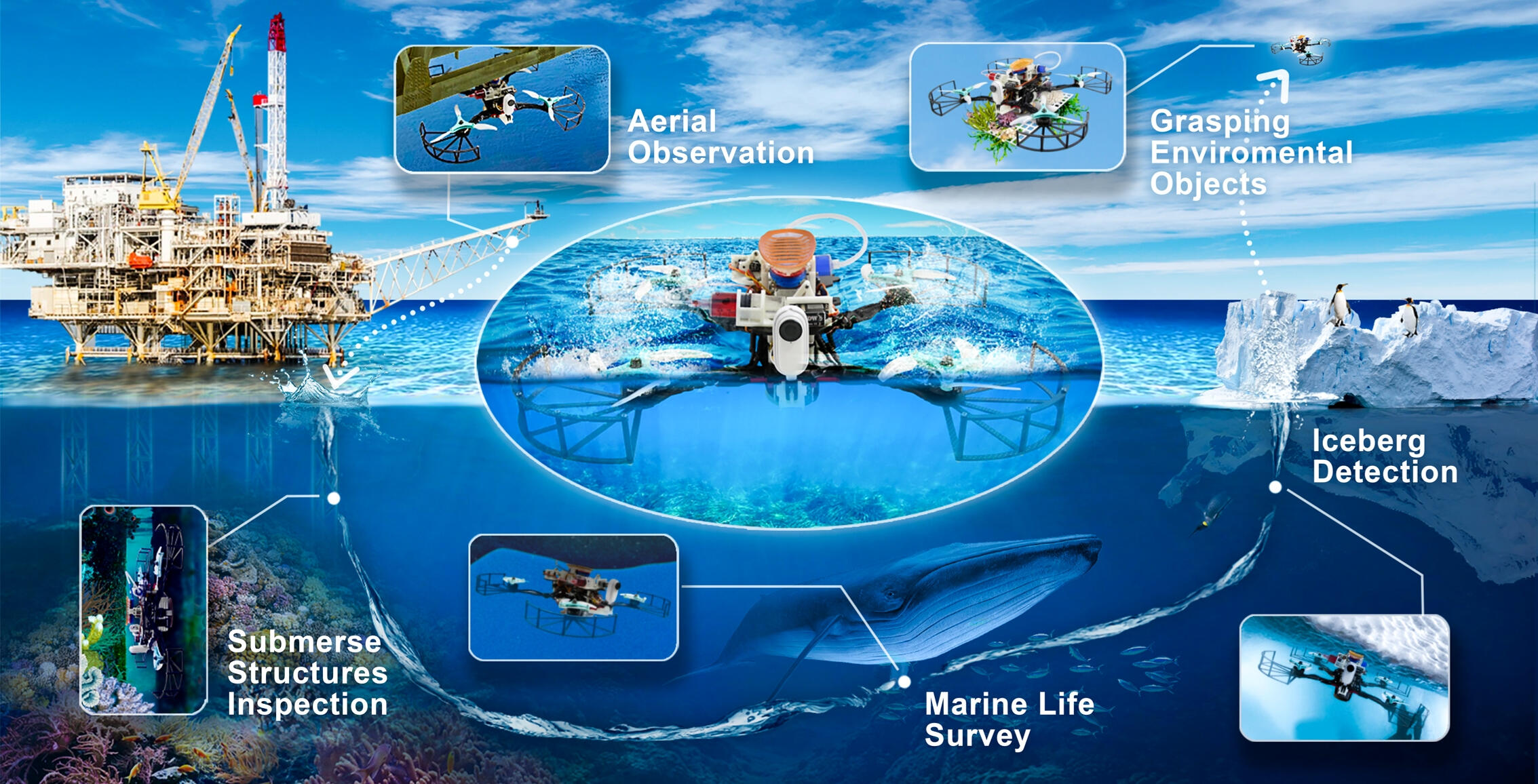
Aerial-aquatic robots capable of crossing the air-water boundary and hitchhiking on surfaces
Bachelor Thesis, Editor Highlighted Paper

Biomimetic Intelligence and Robotics
Design, fabrication, and characterization of a hydrostatic electroactive soft actuator
Paper in Spotlight, Featured by Tech Xplore

Corresponding author & Co-first author, RoboSoft
Octopus-Swimming-Like Robot with Soft Asymmetric Arms
Among Top Downloads (Editor-Recognized)

IEEE RA-L and Soft Robotics
A Biomimetic Adhesive Disc for Robotic Adhesion Sliding Inspired by the Net-Winged Midge Larva
Scroll Down to More ↓
🦾 Empowering Machines with Softness

Science Advances
Versatile adhesive skin enhances robotic interactions with the environment

npj Robotics
Grasping by spiraling: reproducing elephant movements with rigid-soft robot synergy
Aerial-aquatic robots capable of crossing the air-water boundary and hitchhiking on surfaces
Our vision
Abstract
Many real-world applications for robots—such as long-term aerial and underwater observation, cross-medium operations, and marine life surveys—require robots with the ability to move between the air-water boundary. Here, we describe an aerial-aquatic hitchhiking robot that is self-contained for flying, swimming, and attaching to surfaces in both air and water and that can seamlessly move between the two. We describe this robot’s redundant, hydrostatically enhanced hitchhiking device, inspired by the morphology of a remora (Echeneis naucrates) disc, which works in both air and water. As with the biological remora disc, this device has separate lamellar compartments for redundant sealing, which enables the robot to achieve adhesion and hitchhike with only partial disc attachment. The self-contained, rotor-based aerial-aquatic robot, which has passively morphing propellers that unfold in the air and fold underwater, can cross the air-water boundary in 0.35 second. The robot can perform rapid attachment and detachment on challenging surfaces both in air and under water, including curved, rough, incomplete, and biofouling surfaces, and achieve long-duration adhesion with minimal oscillation. We also show that the robot can attach to and hitchhike on moving surfaces. In field tests, we show that the robot can record video in both media and move objects across the air/water boundary in a mountain stream and the ocean. We envision that this study can pave the way for future robots with autonomous biological detection, monitoring, and tracking capabilities in a wide variety of aerial-aquatic environments.
Featured in Science Magazine

Highlighted as cover Image on Science Homepage
Octopus-Swimming-Like Robot
with Soft Asymmetric Arms
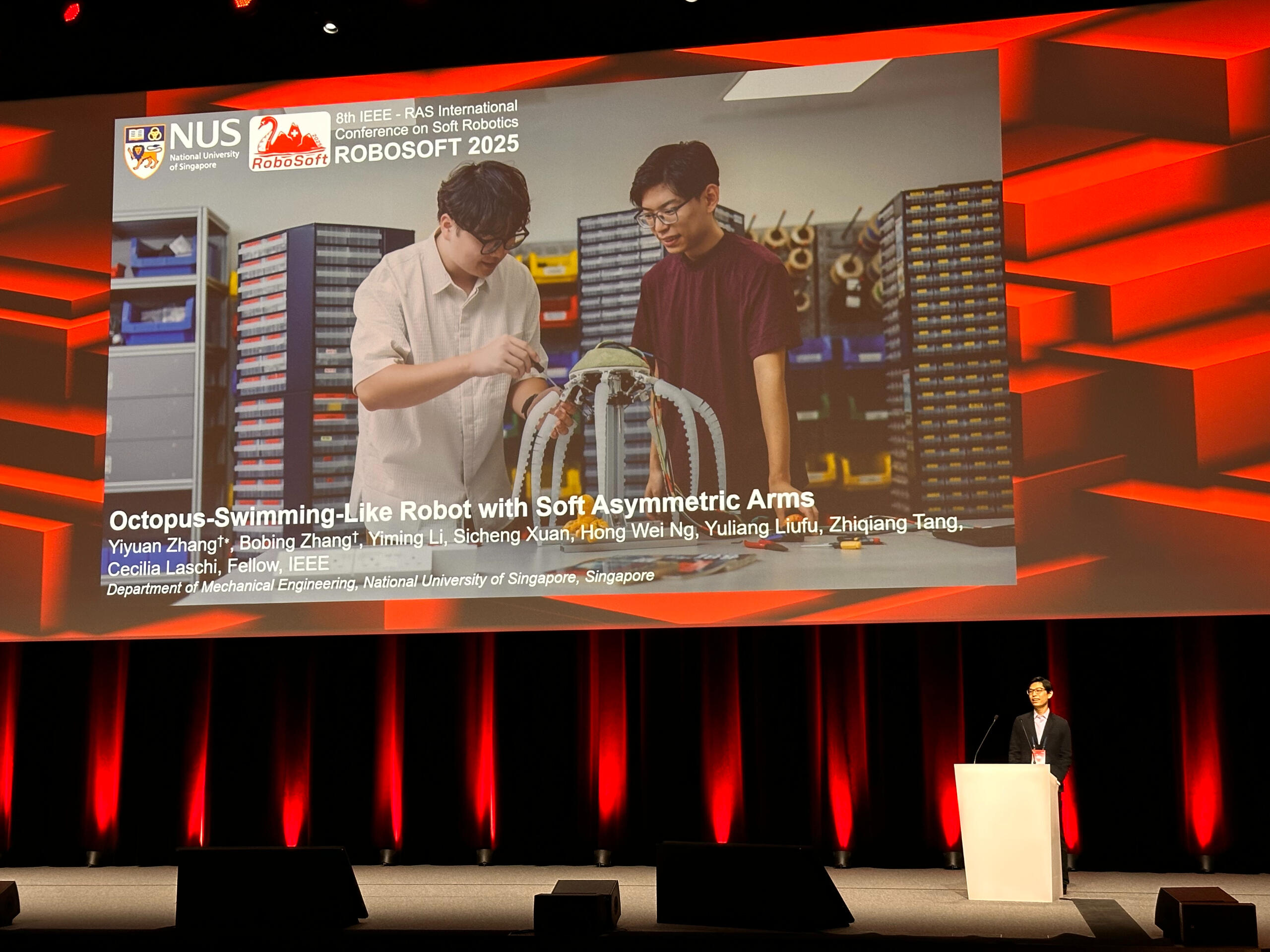
Spotlight Presentation, SwissTech Convention Center, Switzerland
Abstract
Underwater vehicles have seen significant development over the past seventy years. However, bio-inspired propulsion robots are still in their early stages and require greater interdisciplinary collaboration between biologists and roboticists. The octopus, one of the most intelligent marine animals, exhibits remarkable abilities such as camouflaging, exploring, and hunting while swimming with its arms. Although bio-inspired robotics researchers have aimed to replicate these abilities, the complexity of designing an eight-arm bionic swimming platform has posed challenges from the beginning. In this work, we propose a novel bionic robot swimming platform that combines asymmetric passive morphing arms with an umbrella-like quick-return mechanism. Using only two simple constant-speed motors, this design achieves efficient swimming by replicating octopus-like arm movements and stroke time ratios. The robot reached a peak speed of 314 mm/s during its second power stroke. This design reduces the complexity of traditional octopus-like swimming robot actuation systems while maintaining good swimming performance. It offers a more achievable and efficient platform for biologists and roboticists conducting more profound octopus-inspired robotic and biological studies.
Robot Swimming Video
🎉 Honored to be highlighted by Marc Theermann, Chief Strategy Officer at Boston Dynamics.
